
西門子PLCsmart200-PID調節步驟簡介
建議PID參數調節步驟:
(1)前提條件:反饋信號是否穩定,執行機構是否正常以及控制器的正反作用。(確保PID在自動模式下)
(2)積分時間設置為無窮大INF(或9999.9),此時積分作用近似為0;將微分時間設置為0.0,此時微分作用為0 。然后開始調節比例作用,逐步增大比例增益
(3)當過程變量達到給定值且在給定值上下波動,將調好的比例系數調整到50%~80%后,由大到小減小積分時間,直到過程值與設定值相等或無限接近
PID調節有很多種方法,以上僅是建議步驟,也并未考慮微分作用,客戶依據實際情況靈活調節,同時可以參考反饋與給定的曲線圖
用戶經常會遇到這樣的問題:嘗試了很多組PID參數,都無法滿足控制器的要求, 此時需要考慮PID的采樣時間是否適合當前系統。采樣時間就是對反饋進行采樣的間隔。短于采樣時間間隔的信號變化是不能測量到的。采樣時間過短,兩次實測值的變化量太小,也不合適,而且增加PLC的運算負擔;采樣間隔過長,將會引起有用信號的丟失,使系統品質變差,不能滿足擾動變化比較快、或者速度響應要求高的場合。除此以外,也有可能是系統自身的問題,無法調節到穩定,例如, 不規律的干擾,或者反饋信號不穩定。
在開始PID自整定調整前,整個PID控制回路必須工作在相對穩定的狀態。
穩定的PID是指過程變量接近設定值,輸出不會不規則的變化,且回路的輸出值在控制范圍中心附近變化。
問題與解決方法:
1.PID輸出總是輸出很大的值,并在這一區間內調節變化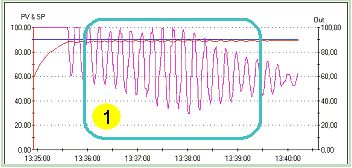



1.超調過大,減小比例,增大積分時間
2.迅速變化,存在小超調
3.實際值緩慢接近設定值,并且無超調的達到設定值
4.增益系數太小和/或微分時間太長
5.益系數太小和/或積分時間太長
電話:13818569113 15721373211
郵箱:fushidianji@139.com
網址:http://morethanzerosum.com
地址:上海青浦區北青公路7171號111-112室

