西門子smart200PLC-PID Wizard - PID向導
PID Wizard - PID向導
Micro/WIN SMART提供了PID Wizard(PID指令向導),可以幫助用戶方便地生成一個閉環控制過程的PID算法。此向導可以完成絕大多數PID運算的自動編程,用戶只需在主程序中調用PID向導生成的子程序,就可以完成PID控制任務。
PID向導既可以生成模擬量輸出PID控制算法,也支持開關量輸出;既支持連續自動調節,也支持手動參與控制。建議用戶使用此向導對PID編程,以避免不必要的錯誤。
 建議用戶使用較新的編程軟件版本。在新版本中的PID向導獲得了改善。
建議用戶使用較新的編程軟件版本。在新版本中的PID向導獲得了改善。
PID向導編程步驟
使用以下方法之一打開 PID 向導:
●在Micro/WIN SMART中的工具菜單中選擇PID向導:
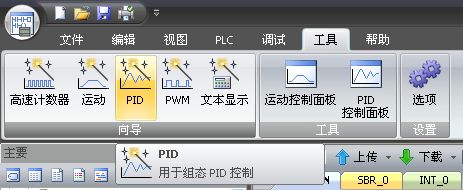
圖1. 選擇PID向導
● 在項目樹中打開“向導”文件夾,然后雙擊“PID”,或選擇“PID”并按回車鍵。

圖2. 選擇PID向導
第一步:定義需要配置的PID回路號
在此對話框中選擇要組態的回路。 最多可組態 8 個回路。 在此對話框上選擇回路時,PID 向導左側的樹視圖隨組態該回路所需的所有節點一起更新。
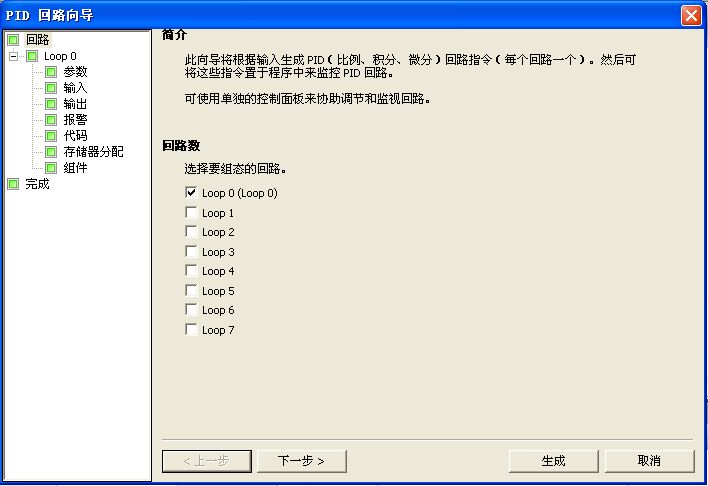
圖3. 選擇需要配置的回路
第二步:為回路組態命名
可為回路組態自定義名稱。 此部分的默認名稱是“回路 x”,其中“x”等于回路編號。

圖4. 為PID回路命名
第三步:設定PID回路參數

圖5. 設置PID參數
圖5中定義了PID回路參數,這些參數都應當是實數:
-
增益: 即比例常數,默認值=1.00。
-
積分時間:如果不想要積分作用可以將該值設置很大(比如10000.0),默認值=10.00。
-
微分時間:如果不想要微分回路,可以把微分時間設為0 ,默認值=0.00。
-
采樣時間:是PID控制回路對反饋采樣和重新計算輸出值的時間間隔,,默認值=1.00。在向導完成后,若想要修改此數,則必須返回向導中修改,不可在程序中或狀態表中修改。
 注意:關于具體的PID參數值,每一個項目都不一樣,需要現場調試來定,沒有所謂經驗參數。
注意:關于具體的PID參數值,每一個項目都不一樣,需要現場調試來定,沒有所謂經驗參數。
第四步:設定回路過程變量
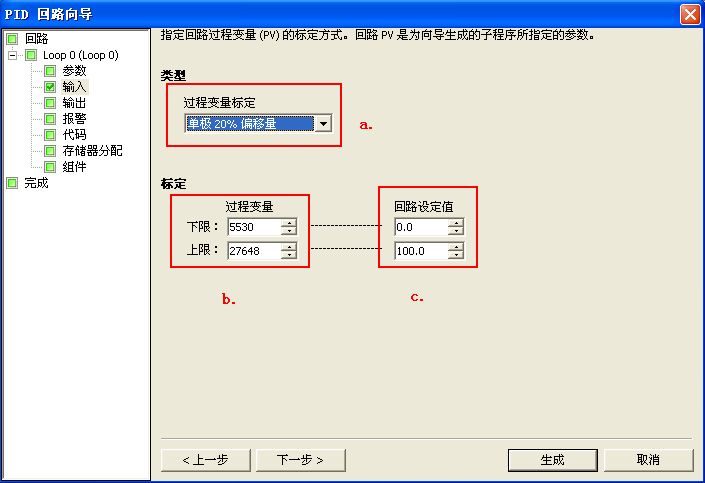
圖6. 設定PID輸入過程變量
-
指定回路過程變量 (PV) 如何標定。可以從以下選項中選擇:
-
單極性:即輸入的信號為正,如0-10V或0-20mA等
-
雙極性:輸入信號在從負到正的范圍內變化。如輸入信號為±10V、±5V等時選用
-
選用20%偏移:如果輸入為4-20mA則選單極性及此項,4mA是0-20mA信號的20%,所以選20% 偏移,即4mA對應5530,20mA對應27648。
-
溫度 x 10 °C
-
溫度 x 10 °F
-
反饋輸入取值范圍
-
在a.設置為單極時,缺省值為0 - 27648,對應輸入量程范圍0 - 10V或0 - 20mA等,輸入信號為正
-
在a.設置為雙極時,缺省的取值為-27648 - +27648,對應的輸入范圍根據量程不同可以是±10V、±5V等
-
在a.選中20% 偏移量時,取值范圍為5530 - 27648,不可改變
-
在“標定”(Scaling) 參數中,指定回路設定值 (SP) 如何標定。 默認值是 0.0 和 100.0 之間的一個實數。
此反饋輸入也可以是工程單位數值,參見:設置給定-反饋的量程范圍。
第五步:設定輸入回路輸出選項
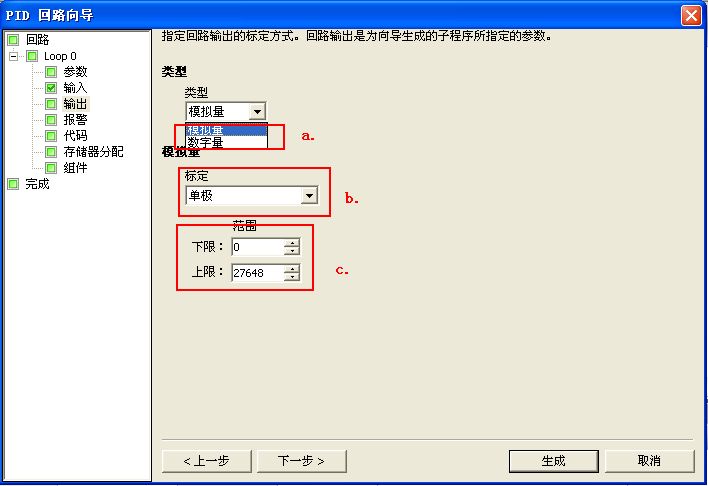
圖7. 設定PID輸出選項
-
輸出類型
可以選擇模擬量輸出或數字量輸出。模擬量輸出用來控制一些需要模擬量給定的設備,如比例閥、變頻器等;數字量輸出實際上是控制輸出點的通、斷狀態按照一定的占空比變化,可以控制固態繼電器(加熱棒等)
-
選擇模擬量則需設定回路輸出變量值的范圍,可以選擇:
-
單極:單極性輸出,可為0-10V或0-20mA等
-
雙極:雙極性輸出,可為正負10V或正負5V等
-
單極20% 偏移量:如果選中20% 偏移,使輸出為4 - 20mA
-
取值范圍:
-
c為單極時,缺省值為 0 到 27648
-
c為雙極時,取值-27648 到27648
-
c為20%偏移量時,取值5530 - 27648 ,不可改變
如果選擇了開關量輸出,需要設定此循環周期,如圖7所示:

圖8. 設定PID輸出為數字量
第六步:設定回路報警選項
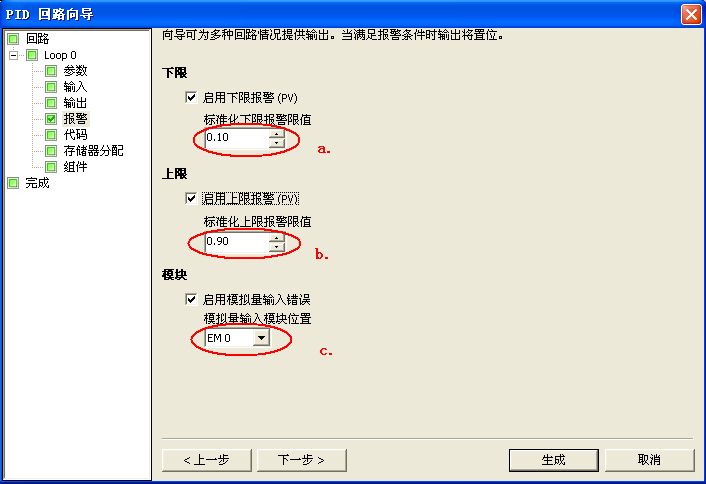
圖9. 設定回路報警限幅值
向導提供了三個輸出來反映過程值(PV)的低值報警、高值報警及過程值模擬量模塊錯誤狀態。當報警條件滿足時,輸出置位為1。這些功能在選中了相應的選擇框之后起作用。
-
使能低值報警并設定過程值(PV)報警的低值,此值為過程值的百分數,缺省值為0.10,即報警的低值為過程值的10%。此值最低可設為0.01,即滿量程的1%
-
使能高值報警并設定過程值(PV)報警的高值,此值為過程值的百分數,缺省值為0.90,即報警的高值為過程值的90%。此值最高可設為1.00,即滿量程的100%
-
使能過程值(PV)模擬量模塊錯誤報警并設定模塊于CPU連接時所處的模塊位置。“EM0”就是第一個擴展模塊的位置
第七步:定義向導所生成的PID初使化子程序和中斷程序名及手/自動模式
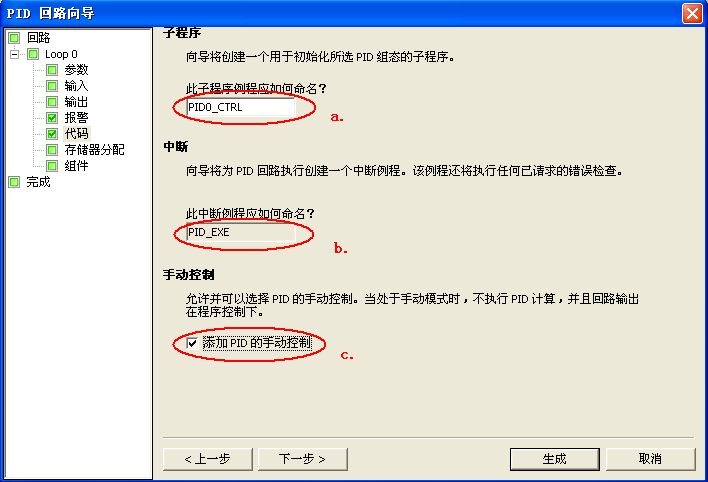
圖10. 指定子程序、中斷服務程序名和選擇手動控制
向導已經為初使化子程序和中斷子程序定義了缺省名,你也可以修改成自己起的名字。
-
指定PID初使化子程序的名字。
-
指定PID中斷子程序的名字
注意:
-
如果你的項目中已經存在一個PID配置,則中斷程序名為只讀,不可更改。因為一個項目中所有PID共用一個中斷程序,它的名字不會被任何新的PID所更改。
-
PID向導中斷用的是SMB34定時中斷,在用戶使用了PID向導后,注意在其它編程時不要再用此中斷,也不要向SMB34中寫入新的數值,否則PID將停止工作。
-
此處可以選擇添加PID 手動控制模式。在PID手動控制模式下,回路輸出由手動輸出設定控制,此時需要寫入手動控制輸出參數一個0.0-1.0的實數,代表輸出的0%-100%而不是直接去改變輸出值。
 PID 控制的自動/手動之間的無擾動切換
PID 控制的自動/手動之間的無擾動切換
第八步:指定PID運算數據存儲區
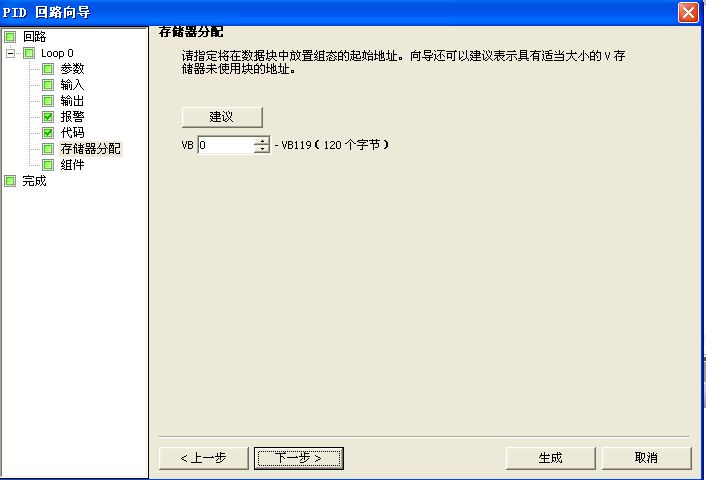
圖11. 分配運算數據存儲區
PID指令(功能塊)使用了一個120個字節的V區參數表來進行控制回路的運算工作;除此之外,PID向導生成的輸入/輸出量的標準化程序也需要運算數據存儲區。需要為它們定義一個起始地址,要保證該地址起始的若干字節在程序的其它地方沒有被重復使用。如果點擊“建議”,則向導將自動為你設定當前程序中沒有用過的V區地址。
自動分配的地址只是在執行PID向導時編譯檢測到空閑地址。向導將自動為該參數表分配符號名,用戶不要再自己為這些參數分配符號名,否則將導致PID控制不執行。
第九步:生成PID子程序、中斷程序及符號表等
一旦點擊完成按鈕,將在你的項目中生成上述PID子程序、中斷程序及符號表等。
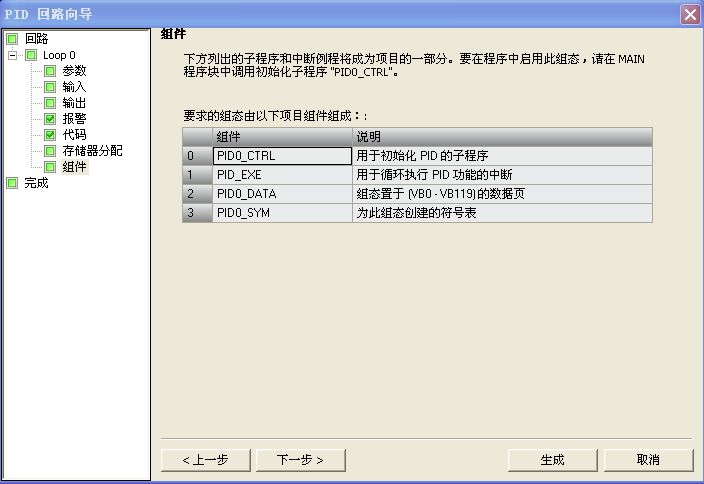
圖12. 生成PID子程序、中斷程序和符號表等
第十步:配置完PID向導,需要在程序中調用向導生成的PID子程序(如下圖)
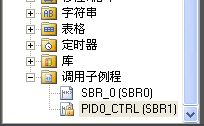
圖13. PID子程序

圖14. 調用PID子程序
在用戶程序中調用PID子程序時,可在指令樹的程序塊中用鼠標雙擊由向導生成的PID子程序,在局部變量表中,可以看到有關形式參數的解釋和取值范圍。
-
必須用SM0.0來使能 PIDx_CTRL 子程序,SM0.0 后不能串聯任何其他條件,而且也不能有越過它的跳轉;如果在子程序中調用 PIDx_CTRL 子程序,則調用它的子程序也必須僅使用 SM0.0 調用,以保證它的正常運行
-
此處輸入過程值(反饋)的模擬量輸入地址
-
此處輸入設定值變量地址(VDxx),或者直接輸入設定值常數,根據向導中的設定0.0-100.0,此處應輸入一個0.0-100.0的實數,例:若輸入20,即為過程值的20%,假設過程值AIW0是量程為0-200度的溫度值,則此處的設定值20代表40度(即200度的20%);如果在向導中設定給定范圍為0.0 - 200.0,則此處的20相當于20度
-
此處用I0.0控制PID的手/自動方式,當I0.0為1時,為自動,經過PID運算從AQW0輸出;當I0.0為0時,PID將停止計算,AQW0輸出為ManualOutput(VD4)中的設定值,此時不要另外編程或直接給AQW0賦值。若在向導中沒有選擇PID手動功能,則此項不會出現
-
定義PID手動狀態下的輸出,從AQW0輸出一個滿值范圍內對應此值的輸出量。此處可輸入手動設定值的變量地址(VDxx),或直接輸入數。數值范圍為0.0-1.0之間的一個實數,代表輸出范圍的百分比。例:如輸入0.5,則設定為輸出的50%。若在向導中沒有選擇PID手動功能,則此項不會出現
-
此處鍵入控制量的輸出地址
-
當高報警條件滿足時,相應的輸出置位為1,若在向導中沒有使能高報警功能,則此項將不會出現
-
當低報警條件滿足時,相應的輸出置位為1,若在向導中沒有使能低報警功能,則此項將不會出現
-
當模塊出錯時,相應的輸出置位為1,若在向導中沒有使能模塊錯誤報警功能,則此項將不會出現
調用PID子程序時,不用考慮中斷程序。子程序會自動初始化相關的定時中斷處理事項,然后中斷程序會自動執行。
第十一步:實際運行并調試PID參數
沒有一個PID項目的參數不需要修改而能直接運行,因此需要在實際運行時調試PID參數。
查看數據塊以及符號表相應的PID符號標簽的內容,可以找到包括PID核心指令所用的控制回路表,包括比例系數、積分時間等等。將此表的地址復制到狀態表中,可以在監控模式下在線修改PID參數,而不必停機再次做配置。
參數調試合適后,用戶可以在數據塊中寫入,也可以再做一次向導,或者編程向相應的數據區傳送參數。
參考鏈接
PID常見問題